1.4 Robot Control
The purpose of the control is to achieve the specific movements, specific forces, and specific movement requirements of the various execution components of the robot, and to finally complete the required work content. It can be said that the robot's work is done by institutions and control systems. Control is again implemented by the control system. The control system is similar to the human brain and controls all the movements of the robot.
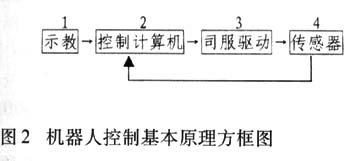
1.4.1 The control principle of the robot
1 "Teaching": Tell the robot what to do.
2 "Control computer": The robot accepts instructions and forms a job control strategy.
3 "Service Driver": To complete the job.
4 "Sensor": Assures correct completion of work and completion. The job information feedback is now performed. The block diagram shows the robot control principle. See Figure 2.
1.4.2 Robot Control Design Points
Guidance and control are the main points of robot control design. Path guidance method. The route design should be based on actual needs; the route should not be set directly on the route and should be given indirectly.
Autonomous guidance. Use the potential energy field to control the movement; use the reinforcement learning of the action result to decide the action. In the control design, pay attention to the evaluation of the overall cost of the guidance system, the reliability and adaptability of the control system. Contents include: system hardware structure design, man-machine interface design, software system composition design, etc.
1.5 Robot Intelligence
Robot intelligence is a technical problem that needs urgent breakthrough. A robot that adapts to various parameters and satisfies its working requirements is identified as an intelligent robot. It includes many aspects of kinematics, path environment and dynamics. Ultimately guarantees the convergence and stability of robot operations.
(1) Intelligent positioning. The intelligent positioning of the robot is shown in Figure 3.
(2) Intelligent method
The method of intelligent robots, that is, assembly work planning, path and action planning, and robot control are performed independently. The reasons are: 1 The computer's capabilities are limited, considering only the location and considering the speed and acceleration together, the search space has a difference of 3 times. That is, the search dimension of the 3-DOF robot increases from 3 to 9. Even with the use of modern high-performance computers, calculations may not be possible due to the escalation of multidimensional space search computations. 2 to ensure the job convergence and action stability. The time series including the speed/acceleration is further determined in the subsequent control of the robot by using the time series of the two planning positions of the operation and the action. Through this division of labor, the former guarantees the convergence of operations and the latter guarantees the stabbility of actions. (to be continued)
Non-woven fabric has the characteristics of moisture-proof, breathable, flexible, light, flame retardant, non-toxic and tasteless, low price, recyclable and so on. If the material is placed outdoors after natural decomposition, its maximum life is only 90 days, when placed indoors in 8 years decomposition, combustion is non-toxic, harmless, so as not to pollute the environment, environmental protection from this.
Cleaning Wipes Nonwoven Fabric,Spunlace Nonwoven,Non Woven Cleaning Wipes,Non Woven Clean Room Wipes
NINGBO JENNY IMPORT & EXPORT CO.,LTD , https://www.jennyclothing.com